Bài Giảng Toán Cao Cấp
4.4. Hệ tọa độ cong trực giao
4.4.1. Định nghĩa
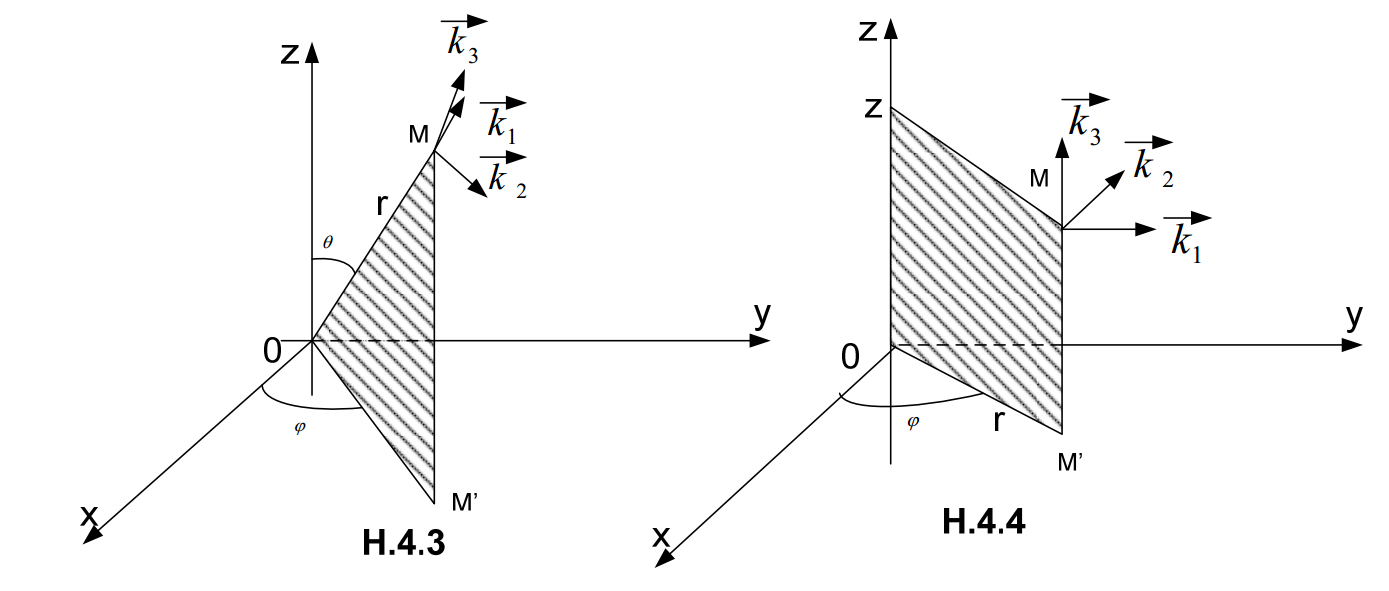
Mỗi một điểm M trong không gian thực được xác định bởi một bộ 3 số sắp thứ tự \( ({{u}_{1}},{{u}_{2}},{{u}_{3}}) \) và ngược lại, được kí hiệu \( M({{u}_{1}},{{u}_{2}},{{u}_{3}}) \). Các số \( {{u}_{1}},{{u}_{2}},{{u}_{3}} \) gọi chung là tọa độ cong của điểm M. Các mặt cong lần lượt có phương trình: \( {{u}_{1}}={{u}_{10}},\,\,{{u}_{2}}={{u}_{20}},\,\,{{u}_{3}}={{u}_{30}} \) ( \( {{u}_{10}},{{u}_{20}},{{u}_{30}} \) là các hằng số) gọi là các mặt tọa độ trong hệ tọa độ cong. Giao của các mặt tọa độ gọi là các đường tọa độ. Nếu các đường tọa độ trực giao từng đôi thì hệ tọa độ cong được gọi là hệ tọa độ cong trực giao. Như vậy, hệ tọa độ Descartes, hệ tọa độ trụ, hệ tọa độ cầu là các hệ tọa độ trực gia (H.4.3, H.4.4)
Nhận Dạy Kèm môn Giải Tích 2 - Calculus II Online qua ứng dụng Zoom, Google Meet,...
- Dạy kèm online tương tác 1 thầy 1 trò! Hỗ trợ trực tuyến 24/7
- Dạy kèm Toán Cao Cấp gồm:
- Giải Tích 1, Giải Tích 2, Giải tích 3
- Đại Số Tuyến Tính, Xác Suất Thống Kê
- Sách Giải Bài Tập của bộ môn Toán Cao Cấp!
- Lịch học sắp xếp sáng - chiều - tối, tất cả các buổi từ thứ 2 ➜ CN
- Thời lượng học 1,5h - 2h/1 buổi!
4.4.2. Liên hệ giữa tọa độ Descartes và tọa độ cong trực giao
Mối liên hệ giữa các tọa độ được cho bởi hệ phương trình: \( \left\{ \begin{align} & x=x({{u}_{1}},{{u}_{2}},{{u}_{3}}) \\ & y=y({{u}_{1}},{{u}_{2}},{{u}_{3}}) \\ & z=z({{u}_{1}},{{u}_{2}},{{u}_{3}}) \\ \end{align} \right.\,\,\,\,\,\,\,\,(4.14) \)
Các đường tọa độ \( {{\ell }_{1}},{{\ell }_{2}},{{\ell }_{3}} \) cho bởi hệ phương trình: \( \left\{ \begin{align} & {{u}_{i}}(x,y,z)={{u}_{i0}} \\ & {{u}_{j}}(x,y,z)={{u}_{j0}} \\ \end{align} \right.,\,\,(i,j=1,2,3) \) và \( i\ne j\,\,\,\,\,\,\,(4.15) \)
Các vectơ đơn vị của các đường tọa độ tại điểm M là \( {{\vec{k}}_{1}},{{\vec{k}}_{2}},{{\vec{k}}_{3}} \) (H.4.5), chúng thỏa mãn: \( {{\vec{k}}_{i}}{{\vec{k}}_{j}}=0 \), khi \( i\ne j \).
Đặt \( {{h}_{i}}=\frac{1}{\sqrt{{{\left( \frac{\partial {{u}_{i}}}{\partial x} \right)}^{2}}+{{\left( \frac{\partial {{u}_{i}}}{\partial y} \right)}^{2}}+{{\left( \frac{\partial {{u}_{i}}}{\partial z} \right)}^{2}}}},\,\,i=1,2,3 \).
Người ta đã chứng minh được những công thức sau đây, cho mối liên hệ giữa tọa độ Descartes và tọa độ cung.
\( d\vec{r}=(dx,dy,dz)=({{h}_{1}}d{{u}_{1}},{{h}_{2}}d{{u}_{2}},{{h}_{3}}d{{u}_{3}}) \)
\( d\vec{S}=(dx,dy,dz)=({{h}_{2}}{{h}_{3}}d{{u}_{2}}d{{u}_{3}},{{h}_{3}}{{h}_{1}}d{{u}_{3}}d{{u}_{1}},{{h}_{1}}{{h}_{2}}d{{u}_{1}}d{{u}_{2}})\,\,\,\,\,\,\,(4.15) \)
\( dV=dxdydz={{h}_{1}}{{h}_{2}}{{h}_{3}}d{{u}_{1}}d{{u}_{2}}d{{u}_{3}} \)
Trong tọa độ cầu \( (r,\varphi ,\theta ) \), ta có: \( {{h}_{1}}=1,\,\,{{h}_{2}}=r,\,\,{{h}_{3}}=r\sin \theta \) .
Trong tọa độ trụ \( (r,\varphi ,z) \), ta có: \( {{h}_{1}}=1,\,\,{{h}_{2}}=r,\,\,{{h}_{3}}=1 \).
4.4.3. Các đặc trưng của trường trong hệ tọa độ cong trực giao
a) \( gradU({{u}_{1}},{{u}_{2}},{{u}_{3}}) \)
Công thức tổng quát: \( gradU=\frac{1}{{{h}_{1}}}\frac{\partial U}{\partial {{u}_{1}}}{{\vec{k}}_{1}}+\frac{1}{{{h}_{2}}}\frac{\partial U}{\partial {{u}_{2}}}{{\vec{k}}_{2}}+\frac{1}{{{h}_{3}}}\frac{\partial U}{\partial {{u}_{3}}}{{\vec{k}}_{3}} \).
Trong tọa độ cầu cho \( U(r,\varphi ,\theta ) \), ta có: \( gradU=\frac{\partial U}{\partial r}{{\vec{k}}_{1}}+\frac{1}{r}\frac{\partial U}{\partial \theta }{{\vec{k}}_{2}}+\frac{1}{r\sin \varphi }\frac{\partial U}{\partial \varphi }{{\vec{k}}_{3}}\,\,\,\,\,\,\,\,\,\,\,\,(4.16) \)
Trong tọa độ trụ cho \( U(r,\varphi ,z) \), ta có: \( gradU=\frac{\partial U}{\partial r}{{\vec{k}}_{1}}+\frac{1}{r}\frac{\partial U}{\partial \varphi }{{\vec{k}}_{2}}+\frac{\partial U}{\partial z}{{\vec{k}}_{3}}\,\,\,\,\,\,\,\,\,\,(4.17) \)
b) \( div\vec{F}({{u}_{1}},{{u}_{2}},{{u}_{3}}) \)
Công thức tổng quát: \( div\vec{F}=\frac{1}{{{h}_{1}}{{h}_{2}}{{h}_{3}}}\left[ \frac{\partial }{\partial {{u}_{1}}}({{F}_{1}}{{h}_{2}}{{h}_{3}})+\frac{\partial }{\partial {{u}_{2}}}({{F}_{2}}{{h}_{3}}{{h}_{1}})+\frac{\partial }{\partial {{u}_{3}}}({{F}_{3}}{{h}_{1}}{{h}_{2}}) \right] \).
Trong tọa độ cầu \( (r,\varphi ,\theta ) \), cho \( \vec{F}=({{F}_{r}},{{F}_{\theta }},{{F}_{\varphi }}) \), ta có:
\(div\vec{F}=\frac{1}{{{r}^{2}}\sin \theta }\left[ \frac{\partial }{\partial r}({{F}_{r}}{{r}^{2}}\sin \theta )+\frac{\partial }{\partial \theta }({{F}_{\theta }}r\sin \theta )+\frac{\partial }{\partial \varphi }({{F}_{\varphi }}r) \right]\,\,\,\,\,\,\,\,\,\,\,\,(4.18)\)
Trong tọa độ trụ \( (r,\varphi ,z) \), cho \( \vec{F}=({{F}_{r}},{{F}_{\varphi }},{{F}_{z}}) \), ta có:
\( div\vec{F}=\frac{1}{r}\left[ \frac{\partial }{\partial r}({{F}_{r}}r)+\frac{\partial }{\partial \varphi }({{F}_{\varphi }})+\frac{\partial }{\partial z}({{F}_{z}}r) \right]\,\,\,\,\,\,\,\,\,(4.19) \)
c) \( rot\vec{F}({{u}_{1}},{{u}_{2}},{{u}_{3}}) \)
Công thức tổng quát: \( rot\vec{F}=\left| \begin{matrix} \frac{{{{\vec{k}}}_{1}}}{{{h}_{2}}{{h}_{3}}} & \frac{{{{\vec{k}}}_{2}}}{{{h}_{3}}{{h}_{1}}} & \frac{{{{\vec{k}}}_{3}}}{{{h}_{1}}{{h}_{2}}} \\ \frac{\partial }{\partial {{u}_{1}}} & \frac{\partial }{\partial {{u}_{2}}} & \frac{\partial }{\partial {{u}_{3}}} \\ {{h}_{1}}{{F}_{1}} & {{h}_{2}}{{F}_{2}} & {{h}_{3}}{{F}_{3}} \\\end{matrix} \right|\,\,\,\,\,\,\,\,\,\,(4.20) \)
Trong tọa độ cầu \( (r,\varphi ,\theta ) \), cho \( \vec{F}=({{F}_{r}},{{F}_{\theta }},{{F}_{\varphi }}) \), ta có:
\( rot\vec{F}=\frac{{{{\vec{k}}}_{1}}}{{{r}^{2}}sin\theta }\left[ \frac{\partial }{\partial \theta }({{F}_{\varphi }}r\sin \theta )-\frac{\partial }{\partial \varphi }({{F}_{\theta }}r) \right]+\frac{{{{\vec{k}}}_{3}}}{rsin\theta }\left[ \frac{\partial }{\partial \varphi }({{F}_{r}})-\frac{\partial }{\partial r}({{F}_{\varphi }}r\sin \theta ) \right]+\frac{{{{\vec{k}}}_{3}}}{r}\left[ \frac{\partial }{\partial r}({{F}_{\theta }}r)-\frac{\partial }{\partial \theta }({{F}_{r}}) \right]\,\,\,\,\,\,\,(4.21) \)
Trong tọa độ trụ \( (r,\varphi ,z) \), cho \( \vec{F}=({{F}_{r}},{{F}_{\varphi }},{{F}_{z}}) \), ta có:
\( rot\vec{F}=\frac{{{{\vec{k}}}_{1}}}{r}\left[ \frac{\partial }{\partial \varphi }({{F}_{z}})-\frac{\partial }{\partial z}({{F}_{\varphi }}r) \right]+{{\vec{k}}_{2}}\left[ \frac{\partial }{\partial z}({{F}_{r}})-\frac{\partial }{\partial r}({{F}_{z}}) \right]+\frac{{{{\vec{k}}}_{3}}}{r}\left[ \frac{\partial }{\partial r}({{F}_{\varphi }}r)-\frac{\partial }{\partial \varphi }({{F}_{r}}) \right]\,\,\,\,\,\,\,\,(4.22) \)
d) Biểu diễn \( \Delta U \)
Công thức tổng quát: \( \Delta U=\frac{1}{{{h}_{1}}{{h}_{2}}{{h}_{3}}}\left[ \frac{\partial }{\partial {{u}_{1}}}\left( \frac{{{h}_{2}}{{h}_{3}}}{{{h}_{1}}}\cdot \frac{\partial U}{\partial {{u}_{1}}} \right)+\frac{\partial }{\partial {{u}_{2}}}\left( \frac{{{h}_{3}}{{h}_{1}}}{{{h}_{2}}}\cdot \frac{\partial U}{\partial {{u}_{2}}} \right)+\frac{\partial }{\partial {{u}_{3}}}\left( \frac{{{h}_{1}}{{h}_{2}}}{{{h}_{3}}}\frac{\partial U}{\partial {{u}_{3}}} \right) \right] \)
Trong tọa độ cầu cho \( U(r,\varphi ,\theta ) \), ta có:
\( \Delta U=\frac{{{\partial }^{2}}U}{\partial {{r}^{2}}}+\frac{2}{r}\cdot \frac{\partial U}{\partial r}+\frac{1}{{{r}^{2}}}\cdot \frac{{{\partial }^{2}}U}{\partial {{\theta }^{2}}}+\frac{\cos \theta }{{{r}^{2}}}\cdot \frac{\partial U}{\partial \theta }+\frac{1}{{{r}^{2}}\sin \theta }\cdot \frac{{{\partial }^{2}}U}{\partial {{\varphi }^{2}}}\,\,\,\,\,\,\,\,\,\,\,(4.23) \)
Trong tọa độ trụ cho \( U(r,\varphi ,z) \), ta có: \( \Delta U=\frac{{{\partial }^{2}}U}{\partial {{r}^{2}}}+\frac{1}{r}\cdot \frac{\partial U}{\partial r}+\frac{1}{{{r}^{2}}}\cdot \frac{{{\partial }^{2}}U}{\partial {{\varphi }^{2}}}+\frac{{{\partial }^{2}}U}{\partial {{z}^{2}}}\,\,\,\,\,\,\,\,\,\,\,\,\,\,(4.24) \)
Sách Giải Bài Tập Giải Tích 2

Ví dụ 1. Cho hàm số \( U=r(\cos \theta +\sin \theta ) \), trong đó r là khoảng cách từ gốc tọa độ O đến điểm M, còn \( \theta \) là góc giữa \( \overrightarrow{OM} \) và trục Oz.
a) Tính \( gradU \)
b) Xác định vectơ đơn vị \( {{\vec{n}}_{0}} \) của mặt phẳng \( U=const \) tại điểm có \( \theta =\frac{\pi }{3} \).
Hướng dẫn giải:
a) Theo giả thiết, hàm số U có các đối số là các tọa độ cầu.
Thay U vào công thức (4.16), ta nhận được: \( gradU=(\cos \theta +\sin \theta ){{\vec{k}}_{1}}+(\cos \theta -\sin \theta ){{\vec{k}}_{2}} \).
b) Ta có \( {{\vec{n}}_{0}}\parallel gradU \), theo trên \( \left| gradU \right|=\sqrt{2} \), thay \( \theta =\frac{\pi }{3} \) vào công thức trên suy ra: \( {{\vec{n}}_{0}}=\frac{1}{2\sqrt{2}}\left| (1+\sqrt{3}){{{\vec{k}}}_{1}}+(1-\sqrt{3}){{{\vec{k}}}_{2}} \right| \).
Ví dụ 3. Tìm hằng số k để trường vectơ cho hệ tọa độ cầu \( \vec{F}={{r}^{k}}\vec{r} \) có thông lượng bảo toàn (trường ống).
Hướng dẫn giải:
Biểu diễn \( \vec{F}={{r}^{k}}\vec{r}=({{r}^{k+1}},0,0) \), theo công thức (4.18) nhận được:
\( div\vec{F}=\frac{1}{{{r}^{2}}\sin \theta }\left[ \frac{\partial }{\partial r}({{r}^{k+3}}\sin \theta ) \right]=(k+3){{r}^{k}}=0 \), suy ra \( k=-3 \).
Ví dụ 4. Chứng minh trường vectơ cho trong hệ tọa độ cầu \( \vec{F}={{r}^{k}}\vec{r} \) là trường thế với mọi số k.
Hướng dẫn giải:
Biểu diễn \( \vec{F}={{r}^{k}}\vec{r}=({{r}^{k+1}},0,0) \), theo công thức (4.21) nhận được \( rot\vec{F}=\frac{{{{\vec{k}}}_{2}}}{r\sin \theta }\left[ \frac{\partial }{\partial \varphi }({{r}^{k+1}}) \right]-\frac{{{{\vec{k}}}_{3}}}{r}\left[ \frac{\partial }{\partial \theta }({{r}^{k+1}}) \right]=0 \), với mọi k.
Vậy trường vectơ đã cho là trường thế.
Ví dụ 5. Biết \( \Delta u=0 \) và \( u=u\left( \sqrt{{{x}^{2}}+{{y}^{2}}} \right) \). Tìm dạng tổng quát của hàm u.
Hướng dẫn giải:
Rõ ràng hàm u được cho trong tọa độ trụ. Theo công thức (4.24), ta có:
\( \Delta u=\frac{{{d}^{2}}u}{d{{r}^{2}}}+\frac{1}{r}\cdot \frac{du}{dr}=\frac{1}{r}\cdot \frac{d}{dr}\left( r\frac{du}{dr} \right)=0 \).
Suy ra: \( r\frac{du}{dr}={{C}_{1}}\Leftrightarrow du={{C}_{1}}\frac{dr}{r}\Rightarrow u={{C}_{1}}\ln r+{{C}_{2}}\) ( \( {{C}_{1}},{{C}_{2}} \) là các hằng số tùy ý).
Ví dụ 6. Biết \( \Delta u=0 \) và \( u=u\left( \sqrt{{{x}^{2}}+{{y}^{2}}+{{z}^{2}}} \right) \). Tìm dạng tổng quát của hàm u.
Hướng dẫn giải:
Rõ ràng hàm u được cho trong tọa độ cầu. Theo công thức (4.23), ta có:
\( \Delta u=\frac{{{d}^{2}}u}{d{{r}^{2}}}+\frac{2}{r}\cdot \frac{du}{dr}=\frac{1}{{{r}^{2}}}\cdot \frac{d}{dr}\left( {{r}^{2}}\frac{du}{dr} \right)=0 \)
Suy ra: \( {{r}^{2}}\frac{du}{dr}={{C}_{1}}\Leftrightarrow du={{C}_{1}}\frac{dr}{{{r}^{2}}}\Rightarrow u=-{{C}_{1}}\frac{1}{r}+{{C}_{2}} \) ( \( {{C}_{1}},{{C}_{2}} \) là các hằng số tùy ý).
Trong quá trình đăng tải bài viết lên website không thể tránh khỏi việc sai sót, nên bạn đọc muốn xem đầy đủ các dạng bài tập giải chi tiết hãy vui lòng mua sách Giải bài tập Giải Tích 2!
Các bài viết cùng chủ đề!
Các Sách Giải Bài Tập - Đề Thi do Trung tâm phát hành!


Bài Giảng Toán Cao Cấp được xây dựng trên WordPress